1. Summary A SMART goal means it is a goal that is Specific, Measurable, Achievable but challenging, Results oriented, and Time focused. Basically a goal that you are able to do, that is specific such as, “I’m going to move this box from here to there.” Measurable, for example, “I’ve moved the box one foot, I’ve got two more feet to go.” Achievable, the box is moved, done. Results, oriented, how do you know the goal is done, when box is there instead of here. And time focused because you must complete it within a period of time. Now my goal was making a tank. In which its base can go forward and rotate, turret can rotate, cannon on turret can go up and down. And space bar shoots a bullet, these are the specific parts. I can measure my success by what parts of the tank I completed(which I will list at the end). I believe I have achieved most of the tank. Results because the tank is done(mostly), and I’ve learned how to make max degrees on a rotation, how to set movements to separate keys, and how to make wheels spin. I’ve had the tank done before June 9th, which was my deadline. So yeah…
I’ve completed body structure, cannon with rotation script, turret with rotation script, body with rotation and movement script, wheels that spin, and 2 different views for the tank, turret view, and 3rd person view.
2. Evidence
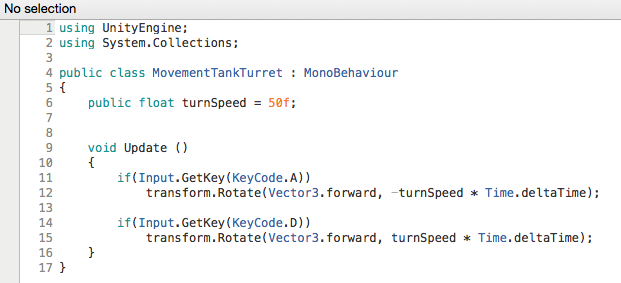
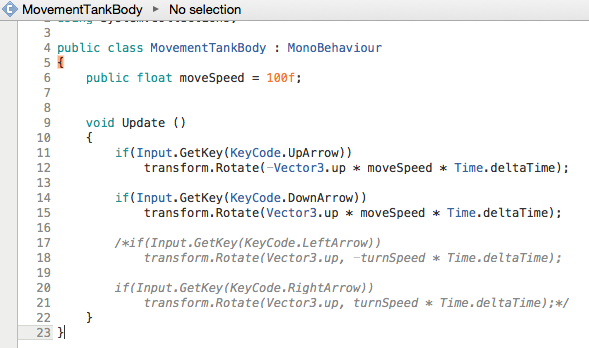
Below is my video of my screencast and the code I created to run the tank.

It may seem that I did not do much, it is the fact that I spend about three weeks trying to make wheels that would move the tank by spinning and getting traction. But I eventually decided to just have the wheels spin and the tank move so it seems as if the wheels are doing the work. 🙂
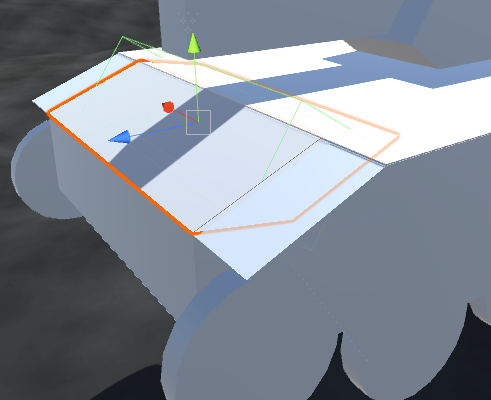
Here is the Hierarchy-
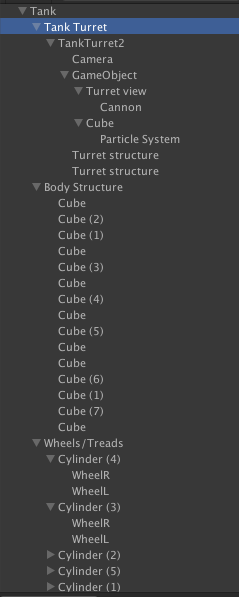
Each cube makes up a section of the tank, each cylinder is the axle in between two wheels, left and right. Turret view is the camera as if looking on top of the cannon on the turret.
Here are some examples of the cubes that make up the tank.
3. What I learned and Problems I Solved
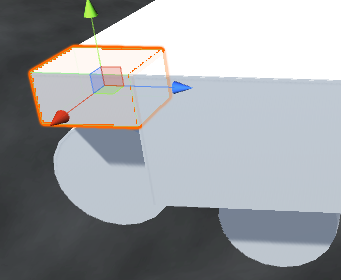
I now better understand a smart goal and what it should look like. But I do not believe I could have made mine better. The amount I set was challenging and I did manage to achieve it in the set time period. Though this may not technically be solving the problem, when I couldn’t get the wheels to move the vehicle, I instead made the vehicle move and have the wheels look like they are moving the vehicle. I figured out how to set a max rotation so that the cannon could only go up a certain degree and no more. Because yeah, tank cannons/turrets can’t rotate endlessly. I learned and figured out how to get around the local size thing. In which if you place another object under an object. It will change its scale to match the object is under. So if you put 1,1,1 as its scale, in reality it is 2,3,1. For example…
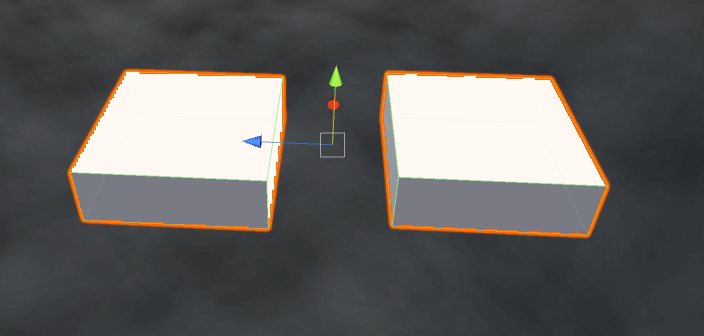
in this picture, both objects are the same exact size. Except the object on the right is the child of the object on the left.

The scale of the parent cube is (3,1,3). (x,y,z). The y is lower which is why the object is flat, this is to show you how it works. Now the scale of the child object is (1,1,1). Yet it is the same scale. The parent cube becomes the “standard scale,” I’m not sure what to call it that will explain it, normally it is just called local scale. The child is based off of the local scale of its parent, and the parent is based on the global scale.